Company and Project Management
South Korea
Customer requirements, project scope, governance, communication, and final delivery management.

About Origin Data Lab
We design targeted collection programs around the scenarios, environments, and edge cases your model needs to resolve.
We translate your target scenarios, locations, actors, sensors, metadata, and delivery requirements into a controlled field collection plan.
From dense mixed traffic to rare edge cases, we collect and structure the real-world conditions your team cannot easily source internally.
Active field operations in Bangladesh, supported by our dedicated capture app and centralized processing pipeline.
Start with a requirement brief, targeted sample, or focused evaluation collection.
No fixed package required. Initial scope review within 24 hours.
Built for fast, requirement-driven collection — from field capture
to structured, traceable delivery.
Custom Collection Partnership
We work directly with AI teams to define the scenes, actors, locations, capture conditions, metadata, and output structure their models require.
Each engagement begins with a requirement brief and is converted into a targeted collection, quality-control, and delivery plan.
This is not a passive catalog purchase. The collection is designed around your model, evaluation objective, and operational constraints.
We convert technical requirements into an executable field collection specification, including capture targets, metadata fields, quality thresholds, and delivery structure.
Our team connects customer requirements directly to field execution, data processing, quality control, and structured delivery.
We make the collection process visible so customers can review how requirements are translated into field tasks, quality checks, metadata, and final delivery.
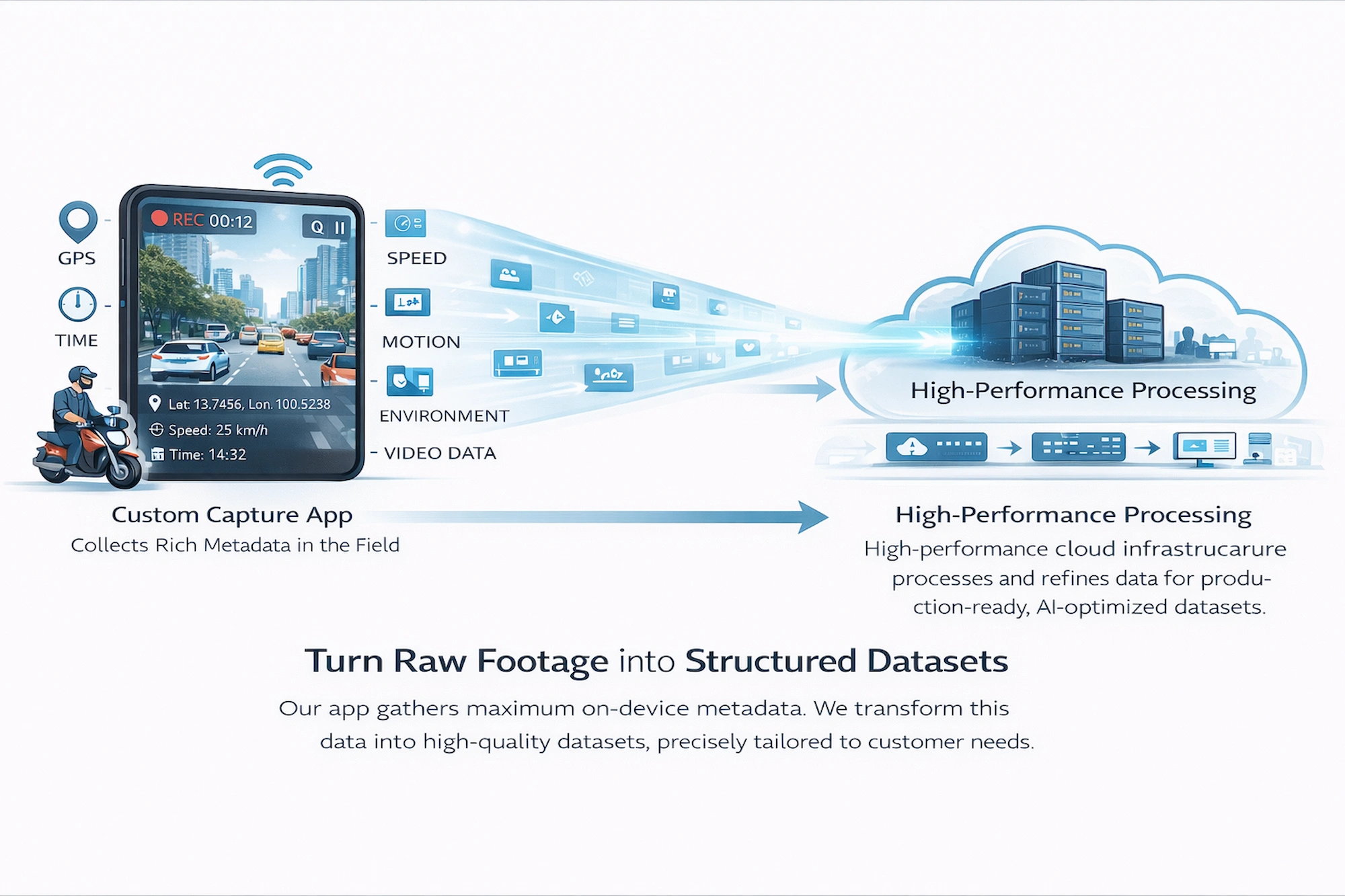
Origin Data Lab connects customer requirements directly to field collection. We define the target environment, scenario, actor mix, capture method, metadata requirements, and quality thresholds before collection begins.
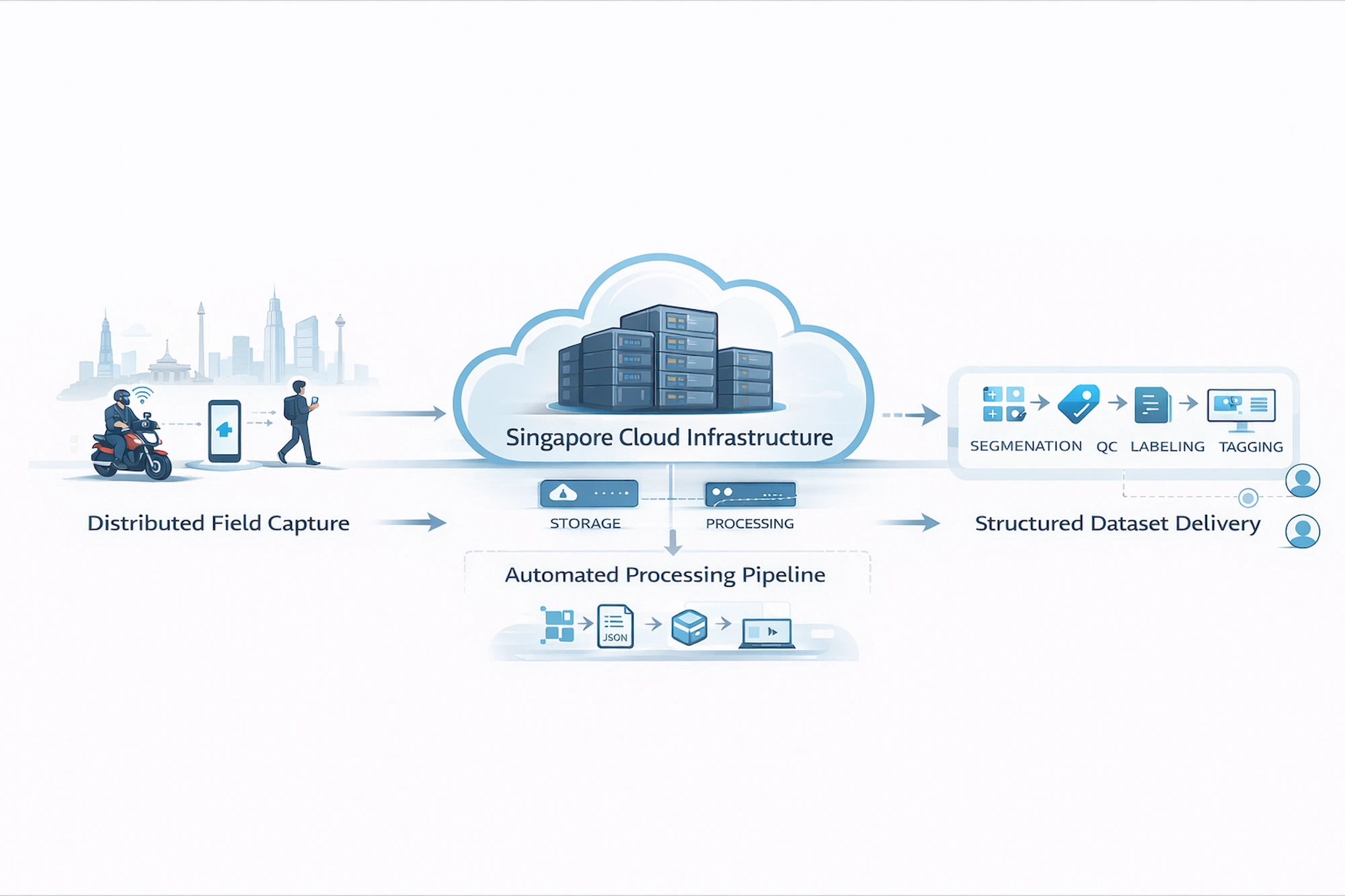
Local field operators then execute the collection plan through our dedicated capture workflow, while centralized systems manage upload, segmentation, metadata processing, quality control, traceability, and delivery preparation.
Depending on project scope, each capture and derived segment can include more than 200 available metadata fields across device, camera, GPS, IMU, timing, collection context, quality, scene, object, and lineage layers.
Collection can be adapted by city, road type, traffic density, time of day, weather, platform, camera perspective, actor type, and customer-defined edge case.
Each project can begin with a small targeted sample before expanding into a larger production collection.
The result is not merely raw footage, but a traceable data package produced against an agreed collection and delivery specification.
A controlled requirement-to-delivery pipeline — from customer specification to field execution and structured handoff.

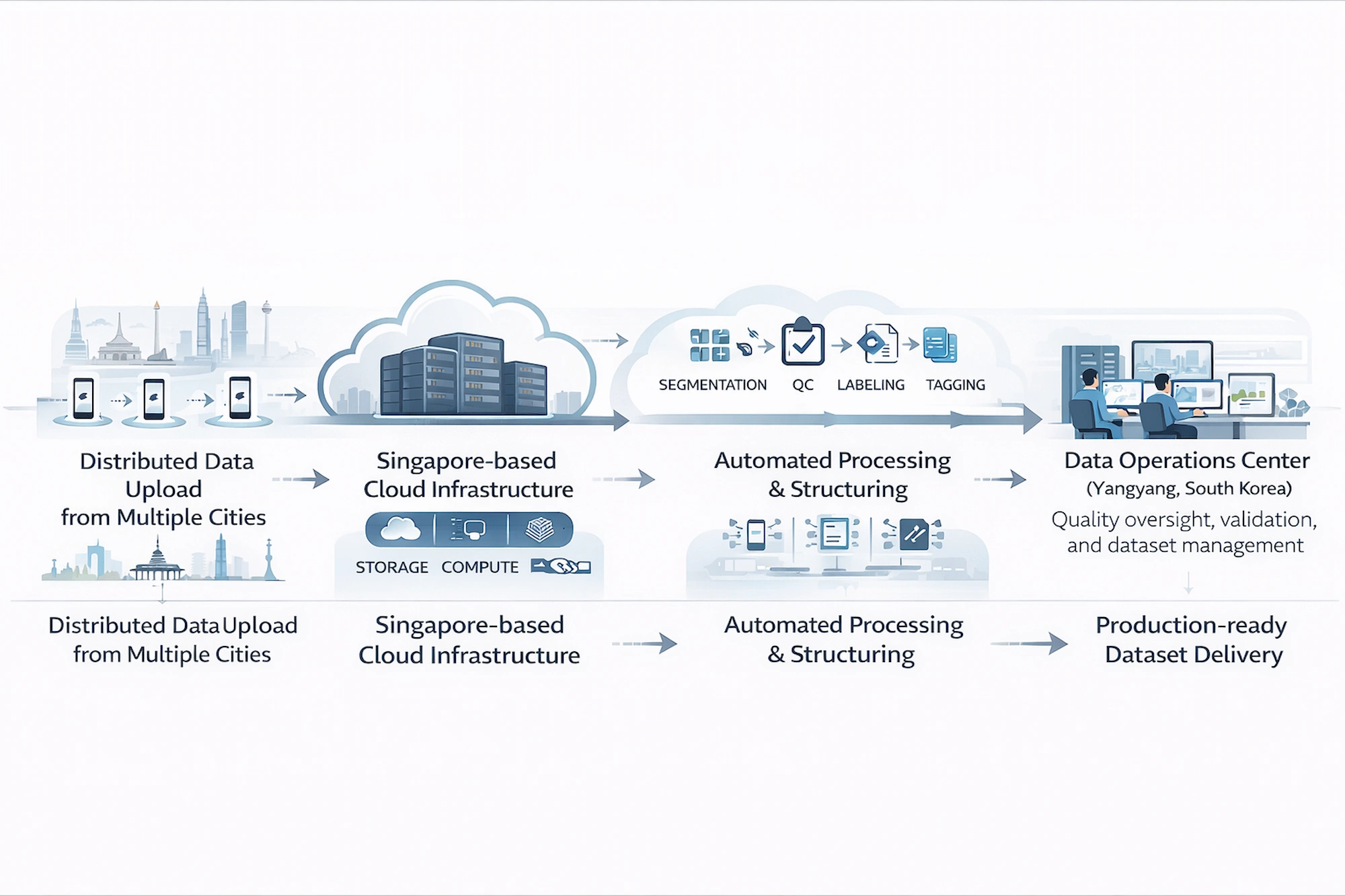


Project briefs are converted into repeatable field instructions so operators can follow the same capture, metadata, and quality requirements.
Captures are centrally uploaded, linked to their collection context, checked against project requirements, and tracked through one processing workflow before delivery.


Custom collection only works when technical requirements can be executed consistently in the field. Our training process converts each project specification into practical capture instructions, acceptance criteria, and field procedures.


Customer projects are coordinated from South Korea, executed through local field operations, and processed through centralized cloud infrastructure.
Company and Project Management
Customer requirements, project scope, governance, communication, and final delivery management.
Active Field Collection
On-the-ground collection capability for dense urban roads, markets, mixed traffic, pedestrian interactions, motorcycles, rickshaws, and customer-defined scenarios.
Processing and Delivery
Centralized ingestion, segmentation, metadata enrichment, quality validation, documentation, and controlled project-specific delivery.
We work with teams that need real-world data unavailable in public datasets, difficult to reproduce in simulation, or too specific to obtain through standard catalogs.
Custom collections for perception, prediction, planning, edge-case discovery, mixed traffic, vulnerable road users, and real-world robustness evaluation.
First-person and environment data for navigation, human interaction, obstacle handling, localization, scene understanding, and embodied intelligence.
Targeted data for benchmark creation, domain adaptation, failure analysis, long-tail scenario testing, and model validation in unfamiliar environments.
Consent, provenance, usage boundaries, and collection context belong in the pipeline — not in a PDF added after the fact. We design these controls into each collection program from the start.
Each project can preserve traceable links between collection requirements, field execution, source captures, metadata, processing history, quality decisions, and delivered outputs.
These figures demonstrate the operating capacity and pipeline readiness behind our custom collection work. They do not represent a fixed catalog: each customer project is scoped, collected, processed, and delivered against its own requirements.
Operational collection statistics are automatically updated from the latest inventory.
Demonstrated Collection Capacity
Our internal field operations demonstrate the ability to coordinate continuous capture, preserve source footage, and convert it into structured segments through the same pipeline used to prepare customer-specific collections.
• 5,300+ source videos processed
• 16,000+ structured segments generated
• Source footage preserved for project-specific segment extraction
Scenario Execution Capability
Our field workflow can be redirected toward customer-defined scenarios, actor combinations, traffic densities, time windows, capture platforms, and difficult model conditions.
• Non-lane-based and mixed-traffic environments
• Dense pedestrian and multi-actor interactions
• Motorbike, rickshaw, vehicle, and roadside activity
• Occlusion-heavy and customer-defined edge cases
Geographic Execution
Bangladesh provides our current operational base for dense urban data collection. Additional locations can be evaluated according to project scope, field feasibility, and customer demand.
• Active field collection capability in Bangladesh
• South Korea-based project and customer management
• Additional country deployment evaluated by project requirement
Share the environment, scenario, actor, sensor, metadata, or failure condition you need. We will assess how it can be collected, processed, validated, and delivered.
Begin with a focused requirement review or targeted sample before scaling into a larger collection.
Target environment, failure scenario, geography, capture method, required metadata, quality threshold, expected volume, delivery format, and timeline.
A partial specification is enough for an initial feasibility review.
No fixed package required. Initial feasibility response within 24 hours.