Real Field Collection
Continuous first-person recordings captured in dense urban environments, together with GPS, IMU, route, time, weather, and contextual metadata.
Starting with high-entropy urban environments in Bangladesh, we collect and structure targeted real-world data for autonomous systems, robotics, and computer vision teams.
Working pipeline from field capture to quality control, traceability, and buyer-ready delivery.
Inspect the data first, then discuss a pilot built around your missing scenarios.
Before expanding into new collection projects, we built and validated a complete end-to-end workflow using real-world urban traffic data from Bangladesh.
Continuous first-person recordings captured in dense urban environments, together with GPS, IMU, route, time, weather, and contextual metadata.
Raw recordings are segmented, validated, quality checked, linked to source recordings, and packaged into engineering-ready datasets.
Start with a focused evaluation batch, then expand through dedicated collection instructions, repeat delivery cycles, and project-dependent field capacity as requirements grow.
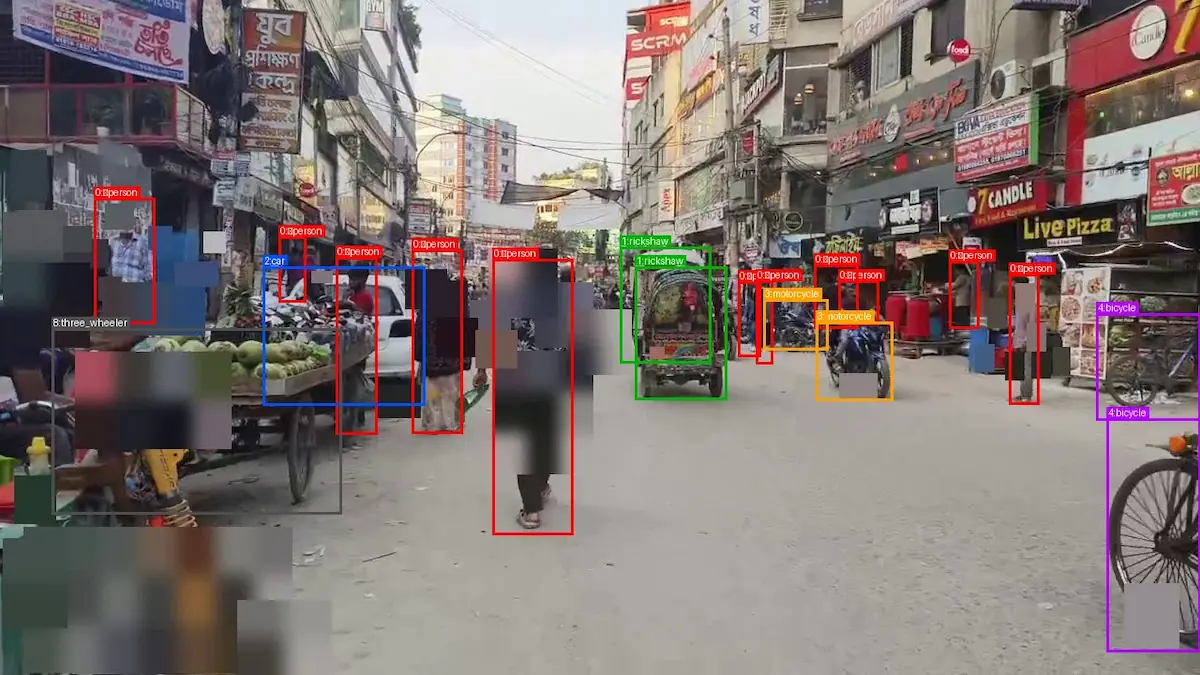
Real examples from our Bangladesh urban traffic pipeline—showing source footage, human-verified annotations, and structured metadata prepared for engineering workflows.
Collection continues through our active field pipeline and can expand according to project scope, target environments, and delivery requirements.
Dense, lane-less movement captured in operational urban environments with pedestrians, motorcycles, buses, cars, and informal transport sharing the same space.
Frame-level bounding boxes reviewed for complex object overlap, heavy occlusion, mixed vehicle classes, and dense multi-agent interaction.
Clip-level engineering metadata including timestamps, GPS, IMU, scene context, capture properties, object statistics, privacy processing, quality indicators, and delivery status.
Preview fields are simplified for readability. Click the metadata card to inspect the complete website-safe JSON record. Final schemas and delivery formats are defined against each project’s technical requirements.
We deliver more than raw recordings. Every collection is prepared for engineering evaluation, model development, and long-term data operations.
dataset_package/ ├── clips_blurred/ │ └── *.mp4 │ ├── human_gt_preview/ │ └── *.jpg │ ├── metadata/ │ └── *.json │ ├── buyer_catalog.json ├── buyer_sample_index.csv ├── sample_index.csv ├── dataset_manifest.json ├── release_context.json │ ├── README.md ├── DATASET_CARD.md ├── QUALITY_ASSURANCE.md ├── PRIVACY_REPORT.md ├── RELEASE_CERTIFICATE.md ├── LICENSE.md │ └── SHA256SUMS.txt
Typical commercial deliveries include engineering documentation, structured metadata, validation records, licensing information, privacy documentation, release certificates, and integrity verification. Some annotation assets and project-specific deliverables are provided according to the agreed project scope.
We specialize in dense, unstructured urban environments where formal traffic rules, clean lane geometry, predictable agent behavior, and controlled visibility cannot be assumed. These long-tail conditions are often underrepresented in simulation and public datasets.
Hesitation, informal negotiation, incomplete signals, and unpredictable decisions that challenge intent prediction and planning systems.
Pedestrians, motorcycles, vehicles, and other agents moving through overlapping space with minimal separation and frequent occlusion.
Weak lane boundaries, mixed transport modes, roadside activity, irregular road geometry, low visibility, and rapidly changing right-of-way.
Each dataset is packaged with the media, metadata, documentation, validation records, and integrity files required for technical evaluation and commercial delivery.
Primary data assets linked through stable clip and source identifiers for traceable engineering use.
Human-verified ground truth is included only where specified. Annotation exports are defined against the project scope.
Buyer-facing documentation and verification files support review, reproducibility, and controlled dataset handoff.
Privacy scope, permitted use, annotation formats, custom schemas, delivery cadence, and licensing terms are confirmed before release.

Step 1 — Define the Bottleneck.
We begin by understanding where your model struggles, your deployment environment,
and the real-world situations your existing data does not represent.
Step 2 — Design the Collection.
Together we define the collection scope, target environments,
metadata requirements, quality standards, and delivery format before field work begins.
Step 3 — Collect, Validate, Deliver.
Our operating pipeline manages field collection, quality review,
metadata generation, traceability, documentation,
and engineering-ready dataset delivery.
Define clearly.
Collect precisely.
Deliver with confidence.
Teams can begin with an existing Bangladesh evaluation sample, define the scenarios their current data does not represent, and expand into project-specific collection with agreed metadata, QA criteria, annotation scope, and delivery controls.
Start with a focused evaluation batch, expand into project-specific collection, and continue through repeat delivery cycles as deployment requirements evolve.
Every engagement is structured to support iterative data acquisition, scheduled delivery batches, and long-term engineering programs—not only a one-time dataset handoff.
Validate whether a focused real-world scenario exposes meaningful weaknesses in your current evaluation, perception, or training workflow.
Build a field collection project around your deployment environment, target behaviors, capture instructions, metadata, and quality requirements.
Continue collecting, validating, and refining real-world data as your model, deployment environment, and engineering roadmap evolve.
Explore a free sample first, then discuss a pilot tailored to your deployment goals. Scope, timeline, metadata, quality requirements, licensing, and delivery cadence are confirmed before collection begins.
Most conversations begin with practical questions about collection, quality, metadata, and delivery.
Yes. Our current operational pipeline is validated in Bangladesh, and the same workflow can be expanded to new environments based on project requirements.
Yes. We define collection around your deployment environment, target behaviors, metadata, and engineering objectives instead of a fixed catalog.
Depending on the project we can deliver GPS, IMU, timestamps, scene context, quality indicators, documentation, and structured metadata.
Yes. Most projects begin with a focused evaluation batch before expanding into larger collection programs.
Every delivery follows documented quality review, metadata validation, traceability, and engineering-ready packaging before release.
Privacy processing is defined for each delivery and may include face and license plate blurring where required. Commercial usage rights, permitted use, redistribution restrictions, delivery scope, and project-specific licensing terms are confirmed before release. Buyer packages can also include QA documentation, source traceability, dataset manifests, and SHA-256 checksums for integrity verification.
Yes. Project-specific confidentiality terms, NDA requirements, delivery access controls, file integrity checks, and buyer-approved handoff procedures can be defined before collection begins. Security scope and operational responsibilities are confirmed during project planning.
Yes. Camera settings, recording instructions, GPS and IMU requirements, metadata fields, quality thresholds, annotation classes, and delivery formats can be defined against the project scope. Specialized sensors or formats are provided only when technically available and explicitly agreed before collection.
Share your deployment environment, failure scenario, or missing data requirement. We’ll review feasibility and recommend the most practical next step: an evaluation batch, custom collection, or ongoing data partnership.
Scope, timeline, metadata, quality requirements, pricing, and licensing are confirmed before collection begins.